
Uma opção interessante para quem está começando com linux embarcado é a nova BeagleBone Black (BBB). A BeagleBoard.org anunciou em 23 de abril essa nova versão da BeagleBone (BB), contendo uma serie de aprimoramentos comparado a sua versão anterior.
A BeagleBone Black é uma plataforma de linux embarcado open-source, voltada para desenvolvedores e hobistas. Ela é foi desenvolvida com o intuito de rodar Linux ou Android usando seu poderoso processador TI Sitara AM3359 ARM Cortex-A8 de 1 Ghz, sua memoria DDR3 de 512Mb, 2Gb de memória flash onboard e uma nova porta micro-HDMI.
O melhor de tudo... somente custando $45 quase R$ 100!!!
Se acredita que ela foi uma resposta ao sucesso da Raspberry Pi sua principal concorrente no momento, custando apenas $25-$35. Apesar da Raspberry Pi oferecer menos I/O e seu processador ser lento o bastante para não rodar eficientemente Android, suas vendas superaram as expectativas.
Características
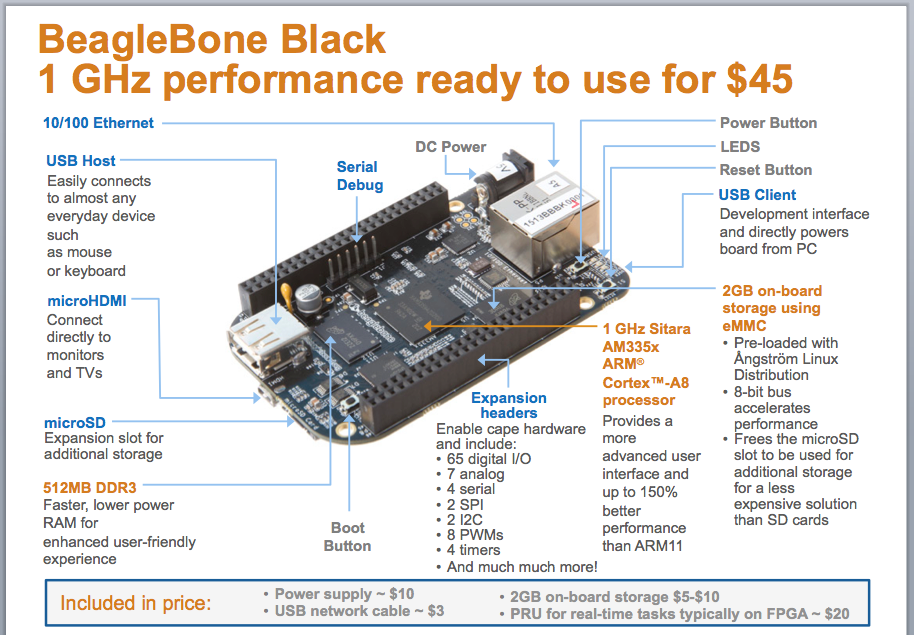
Para salvar dinheiro a BBB continuou com o ARM Cortex-A8 System-on-chip (SOC) inves do upgrade para Arm Cortex-A9. Porem, esse processar é notável pelas inúmeras interfaces analógicas, PWM e as Programmable Real-Time Unit (PRU), que são dois microcontroladores (co-processadores programáveis) que permite customização de I/O sem utilizar o processador principal.
Como antes, a BBB está equipada com uma porta Fast Ethernet, USB 2.0 Host e mini-USB 2.0 Client. Os conectores de extensão de 2 x 46 pinos do dispositivo é compatível com as mais de 30 capas da BeagleBone antiga, incluindo extensões wireless, touchscreens, motores, e I/O. Até quatro placas ou capas podem ser empilhadas.
Uma das vantagens do BBB é a sua memória flash onboard de 2Gb que já vem pré-gravada com uma nova versão do Angstrom Linux. Além de prover um boot em menos de 10 segundos, essa memória libera o slot microSD para armazenamento ou para carregar outros Sistemas Operacionais (S.O.) como Android ou distribuições Linux desde Fedora até Ubuntu. Contudo, vale resaltar que o tempo de gravação de do microSD para a memória flash onboard varia de 25 a 45 minutos. Entre outros componentes a versão pré-gravada do Angstrom Linux já contém o Linaro toolchain, a C compiler, Python, Qt, OpenCV e o Cloud9 IDE completo com o “Bonescript” que é uma linguagem de script Linux/Javascript.
Entre suas características estão:
- Processador — TI Sitara AM3359 (Cortex-A8 @1GHz)
- 3D graphics accelerator
- NEON floating-point accelerator
- 2x PRU 32-bit microcontrollers
- Memória — 512MB DDR3 RAM (606MHz); 2GB onboard eMMC flash; microSD slot
- Networking — 10/100 Ethernet
- Outros I/O:
- Micro-HDMI
- USB 2.0 host
- Mini-USB 2.0 client
- 20-pin CTI JTAG interface (optional)
- Conector de expanção I/O:
- 3x serial
- McASP0, SPI1, I2C
- 65x GPIO
- CAN
- LCD
- GPMC, MMC1, MMC2
- EHRPWM
- 7x AIN (1.8V max.)
- 4x timers; XDMA interrupt
- Outras caracteristicas — reset, boot, butões
- Fontes de alimentação:
- Mini-USB, DC jack, or 5VDC externo
- Regulador PMIC
- Aproximadamente 2.3 Watts @ Consumo máximo
- Tamanho — 8.63 x 5.33 cm (3.4 x 2.1 inches)
- Peso — 39.7 g (1.4 oz)
Primeiras impressões
Minha primeira impressão é que foi feita bastante voltada para pessoas com pouco conhecimento em Linux Embarcado, pois prove uma IDE para fazer programas simples para manipular I/O. Porém apesar de novo, de ainda requerer algumas atualizações e mais suporte especifico para a versão BBB, acredito que seja uma solução de baixo custo e bem potente para quem quer brincar com Linux Embarcado. Estou usando bastante em um projeto que requer aquisição de imagem de webcam, SPI, interrupção e I/Os.Futuros Posts
Futuramente irei escrever posts sobre:
- Diferentes maneiras de acessar a BeagleBone Black.
- Como usar o sistema de arquivos para manipular os I/Os, utilizando C, Python e Shell Script.
- Como adquirir imagens ou vídeo de uma webcam usando Video4Linux e OpenCV.
- Como usar o OpenCV para adquirir imagens e processar-las em tempo real.
- Como usar o Device Tree para habilitar a SPI.
Fontes:
Nenhum comentário:
Postar um comentário